Как из неустойчивой системы сделать устойчивую. Устойчивость систем автоматического управления (сау)
Под устойчивостью или стабильностью системы в широком смысле понимается свойство системы возвращаться в некоторое установившееся состояние или режим после нарушения какими либо внешними или внутренними факторами.
Система может характеризоваться весьма сложным поведением, непрерывно изменятся, но при этом некоторые ее параметры могут сохранять постоянные значения. В таком случае можно говорить об устойчивости системы относительно именно этих параметров.
Например, исследуя процессы в колебательном контуре, было установлено, что не зависимо от начальных значений напряжения и тока, независимо от того имеет ли место затухающие или незатухающие колебания, частота их в данном контуре всегда остается неизменной и определяется параметрами контура. Это дает права назвать колебательный контор системой устойчивой относительно частоты собственных колебаний.
По значению к понятию устойчивости близки понятии равновесия и стационарности (состояния равновесия, стационарный процесс). Однако эти понятия имеет более узкий, частный смысл. Таким образом, более узким, частным является и употребляемое иногда понятие устойчивости системы как способности её стремиться из различных начальных состояний к некоторому равновесному, стационарному состоянию.
Основным содержанием теории устойчивости является: исследования влияния возмущающих воздействий на поведения системы, при этом под возмущающими факторами понимают силы обычно неизвестные заранее, которые как следствие своей неопределенности, так и в следствие относительной малости по сравнению с основными силами, не учитываются при описании движений системы.
Другим примером устойчивости поведения системы является ее цикличности.
Цикличным поведением называется такое, когда система при отсутствии возмущений периодически многократно проходит одну и ту же последовательность состояний – устойчивое множество состояний.
Относительно некоторого возмущения действующего на систему, её состояние равновесия (или цикл) может характеризоваться несколькими типами устойчивости.
Если система возвращается в состояние равновесия при любых возможных воздействиях на неё (при любых возмущениях), то равновесия называют абсолютно устойчивым . Например, маятник.
Если система, при возмущениях возвращается в состояние равновесия только из некоторой области, то равновесие называют устойчивой относительно этой области . Здесь примером может быть кирпич, который если чуть-чуть наклонить, то вернется в свое состояние, а если сильно наклонить, то упадет.
Если после воздействия на систему она сохраняет новое состояние, вызванное этим воздействием, то систему называют безразлично устойчивой . Простейшим примером является однородный круглый диск, укрепленный на оси, проходящий через его центр.
Во всех остальных случаях, система является не устойчивой.
В сложных кибернетических системах в зависимости от характера исследуемых задач и типа возмущения предлагается применять различные методы определения устойчивости (критерии устойчивости). Одним из таких методов, получившее широкое распространение, является определение устойчивости предложенным ученым Ляпуновым: предполагается, что некоторый объект (система автоматического управления) описывается системой дифференциальных уравнений.
Устойчивость поведения систем, как правило, является положительным свойством, обеспечивающим их нормальное целенаправленное функционирования и сохранения целостности в экстремальных условиях. Однако, в ряде случаев, устойчивость отражает инертность, косность системы, ограничивающую возможность управления ими.
Устойчивость является свойством всей системы в целом, а не в какой либо отдельной её части. Система, состоящая из нескольких устойчивых подсистем, может оказаться неустойчивой и наоборот: при объединения некоторого количества неустойчивых подсистем, может возникнуть устойчивая система, в зависимости от способа такого объединения.
С понятием устойчивости тесно связано понятие гомеостаза или гомеостазиса (от греч гомео – равный, стазис – состояние), применяемое вначале в биологии, где оно обозначало поддержание постоянства существенных параметров организма (температура, давление, состава крови и т.д.). В настоящее время гомеостазисом называют свойство системы, при взаимодействии со внешней средой, сохранять существенные параметры в некоторых заданных пределах.
Для иллюстрации явления гомеостазиса английским нейрофизиологом У.Р. Эшби была построена аналоговая модель, названая им гомеостатом, содержащая 4 вращающиеся магнита, изменяющих при своем вращении сопротивления 4ьох жидкостных потенциометра.
Экономические системы и их особенности
Экономические системы представляет частный случай сложных динамических систем.
Экономическую систему определяют как функциональную подсистему общества, в которой осуществляется производство, распределение и потребление материальных благ. Схематично можно представить следующим образом:
В результате приложения общественного труда происходит преобразование природных ресурсов в материальные блага, потребляемые обществом, таким образом, общество по отношению к экономической подсистемы преобразования ресурсов (производственной системе) выступает с одной стороны как ассоциация производителей, с другой как ассоциация потребителей, формирующее определенные требования к материальным благам – их ассортименту, количеству и качеству.
Результат сравнения параметров общественной потребностей и фактически произведенных материальных благ, то есть разность между общественной потребностью и возможность её удовлетворения представляет стимул развития экономики, реализуемой в процессе управления. Однако, в процессе управления реализуется не только простые результаты такого сравнения, но и цели вырабатываемые обществом и определяемые рядом социально-политических факторов, свойственных той или иной общественной формации и в первую очередь в форме собственности на средства производства.
Экономические системы характеризуются рядом следующих особенностей:
Они отличаются большой сложностью, обусловленное в наличие множественных и достаточно сильных материальных и информационных связей между подсистемами и элементами системы
Для экономических систем характерны непрерывное, динамичное и в макро-масштабах не повторяющие развития по сравнению, например, с биологическими системами. Так если виды животных или растений в процессе эволюции меняются за период 1000, 10000 и более лет, то способы производства, экономические отношения могут претерпевать существенные и даже неоднократные изменения в течение жизни одного поколения людей.
Экономические системы испытывают непрерывное воздействие природных факторов и общества, при чем эти воздействия имеют в основном недетерминированный, а стохастический характер. Так распределение природных ресурсов, состояние погоды и другие факторы внешней среды поддаются прогнозированию лишь с некоторой степени достоверности. В свою очередь и определение потребностей общества в материальных благах так же поддаются лишь статистические оценки. Это обусловлено и сложностью и изменчивостью потребностей и вкусов отдельных членов общества, влиянием моды, и статистической природной демографией, определяющие количественные потребности общества и размеры трудовых ресурсов. Неопределенный в значительной степени характер носит так же прогнозы развития науки, возможности появления тех или иных открытий, изобретений и усовершенствований, эффективности внедрения новой техники и технологий в производство.
Одной из важнейших функций экономических систем является производство и соответственно одной из основных подсистем является производственная система.
В производственной системе осуществляется преобразование материально-вещественных компонентов – природных ресурсов в материальные блага, предназначенные для общественного потребления.
В производственной системе и соответственно производственно-технологической структуре характерны достаточно четко выражены иерархические свойства. При описании ее иерархической структуры нужно учитывать как вертикальные (отраслевые), так и горизонтальные (региональные) аспекты формирования структуры, при этом первичными элементами, то есть звеньями самого низкого уровня иерархии являются элементарные технологические операции.
Дальнейшее их рассмотрение не имеет социально-экономического смысла так как оно уже приводит в область изучения физиологических свойств. На более высоких уровнях иерархии находятся цеха, предприятия, производственные комплексы, отрасли и т.д. Подсистемы иерархической производственной системы связаны между собой в первую очередь материальными потоками (сырье, заготовки, полуфабрикаты, комплектующие изделия, готовые изделия и т.п.).
При этом каждому материальному потоку можно сопоставить определенный информационный поток. Так от производственного подразделения низшего уровня иерархии передается информация о производственных возможностях и их реализации в плановые органы более высшего порядка – объединения, отрасли которые в свою очередь передают ее в государственные органы управления.
Последние пользуясь связями сверху вниз передают административно-директивные задания и определённые параметры экономического функционирование.
На ряду с вопросами структуры производственно-экономических систем важную роль играют проблемы их инфраструктуры. Под инфраструктурой в экономике понимают совокупность отраслей и видов деятельности который является внешним по отношению к основному производственному циклу обслуживает производственную и непроизводственную сферу экономики обеспечивая тем самым нормальное функционирование. Основных отраслей материального производства и развития производительных сил.
К инфраструктуре относят:
Транспорт и связь
Научные учреждения и учебные заведения
Коммунальные хозяйства
Учреждения культуры т.д.
Особенности экономических систем выделяют особенности производственной деятельности предприятия к относящихся к данной системы. Так особенности аграрной экономической системы вытекают из особенности сельскохозяйственного производства. Одной из особенностью сельхоз производства является то, что получение продукции, осуществляется здесь единственным путем, то есть биологического синтеза с помощью растений, выращиваемых в естественном грунте.
В отличие от таких средств производства, как машины, строения, подвергающиеся износу и требующие замены такие производственные ресурсы, как уголь, нефть, руда, запасы которых истощаются, земля при правильном ведении хозяйства, наоборот может превышать свое плодородие. Тоже можно отнести и к природным ресурсам: лесам, животный мир, рыбные запасы и т.д.
Ещё одной особенностью сельхоз производства является его цикличность, при чем циклы эти могут быть весьма длительными: земледелии от года до 2ух и более лет, в садоводстве и животноводстве более десятка лет. В течение цикла производства имеет место ситуации, когда интервалы времени, необходимые для превращения исходного материала в готовый продукт, не совпадает с интервалами времени, требующие воздействие труда. Так основной процесс роста и созревание зерновых культур происходит почти без приложения труда за счет естественных воздействий окружающей среды – атмосферной влаги и солнечной радиации. А так как эти факторы оказываются от года году весьма не постоянными и даже не поддаются долгосрочному прогнозированию, то тем самым выносится стохастичность и не возможность точного планирования в природу сельхоз производства.
Существенно отличается технологичные процессы промышленного и сельхоз производства.
В промышленном производстве сырье, предметы труда заключают в себе, как правило всю массу производимого продукта, так например, для изготовления автомобиля необходимо поставить на завод соответствующее количество метала, заготовок и других материала. Между тем исходным материалом для сельхоз производства является лишь значительно меньше по массе исходного материала, элементы, например семена, которые содержат только зародыши будущего биологического объекта и некоторое минимальное количество питательных веществ, необходимого для начальной стадии их развития. В дальнейшем масса производимого продукта создается в результате естественного роста и развития растений и животных, и усвоения нужных ингредиентов из внешней среды (почва, воздух, удобрение и т.д.). Это особенность сельхоз производства является его ещё одним фактором стохастичности.
Все перечисленные основные факторы и ряд других, менее существенных затрудняет достижение в сельском хозяйстве той ритмичности, организованности, высокой эффективности использования современной техники и средств автоматизации.
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Тема 4. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Диплом, это двадцать минут позора и кусок хлеба на всю жизнь. Временная функция многовариантна, характеристическое уравнение черт знает какого порядка, но система работает устойчиво. Стоит ли подводить под это дело еще и частотный анализ?
Владимир Кузьмин. Новосибирский геофизик Уральской школы. ХХ в.
Ты никогда не будешь достаточно знать, если не будешь знать больше чем достаточно.
Уильям Блейк.
Введение.
1. Критерии устойчивости. Понятие устойчивости системы. Условие устойчивости САУ. Алгебраические критерии устойчивости. Критерий Рауса. Критерий Гурвица.
2. Частотные критерии устойчивости. Принцип аргумента. Критерий устойчивости Михайлова. Критерий устойчивости Найквиста.
3. Запас устойчивости систем. Понятие структурной устойчивости. Понятие запаса устойчивости. Анализ устойчивости по логарифмическим частотным характеристикам.
4. Точность систем. Статическая точность. Динамическая точность.
5. Качество систем. Показатели качества систем управления. Показатели качества переходного процесса. Последовательное корректирующее устройство. Параллельное корректирующее устройство. Метод Солодовникова. Программы анализа качества процессов управления.
6. Случайные процессы в системах. Модели случайных сигналов. Фильтрация помех. Фильтр Винера. Частотная характеристика фильтра.
Введение
Важнейшей задачей анализа динамических систем управления является решение вопроса об их устойчивости. Техническое понятие устойчивости систем автоматического управления отражает свойство технической системы не только стабильно работать в нормальных режимах, но и "не уходить вразнос" при отклонении всевозможных параметров системы от номинала и влиянии на систему дестабилизирующих воздействий, т. е. способности системе возвращаться к равновесному состоянию, из которого она выводится возмущающими или управляющими воздействиями. Устойчивость системы - техническое требование в ряду более сложных требований, связанных с показателями качества и точности САУ.
4.1 . КРИТЕРИИ УСТОЙЧИВОСТИ .
Понятие устойчивости системы. Система находится в состоянии равновесия, если при отсутствии воздействия на систему возмущающих факторов ошибка регулирования (разность между заданным и фактическим состоянием системы) стремится к нулю. Под устойчивостью понимается способность динамической системы возвращаться в равновесное состояние после окончания действия возмущения, нарушившего это равновесие. Неустойчивая система после воздействия возмущения удаляется от равновесного состояния или начинает совершать вокруг него колебания с нарастающей амплитудой.
Возникновение неустойчивых (расходящихся) колебаний в системе можно проследить на примере следящей системы с обратной связью (рис. 4.1.1). Допустим, что в установившемся состоянии равновесия при опорном сигнале u o на регуляторе Р выходное состояние объекта управления ОУ равно y уст. Это состояние поддерживается сигналом рассогласования е уст, который формируется в регуляторе Р по разности опорного сигнала и сигнала обратной связи у ос-уст, т.е. е уст = u o -у ос-уст. В первый момент включения системы в силу инерционности обратной связи у ос = 0, а, следовательно, e(t) >> е уст, что вызывает нарастание выходной величины y(t), которая будет стремиться к y(t) >> у уст по крайней мере, до тех пор, пока сигнал обратной связи не начнет уменьшать значение e(t). Однако значительно возросшая величина y(t) через ОС передается на вход регулятора системы и может настолько существенно уменьшить значение e(t), что это может привести к последующему снижению величины выходного сигнала до значений y(t) << у уст, т.е. к возникновению колебательного процесса относительно равновесного состояния. При неблагоприятном соотношении параметров системы колебательный процесс может быть незатухающим и даже расходящимся. Пример такого процесса в концертной акустике хорошо известен – свист из динамиков, если коэффициент обратной связи от динамиков на микрофоны на определенных частотах становится положительным.
Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы. Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы. Соответственно, и задача исследования систем на устойчивость может быть поставлена двояко:
1) устойчива ли система при заданном значении ее параметров;
2) в каких диапазонах можно изменять параметры системы, не нарушая ее устойчивости.
Вторая задача исследования имеет место при наладке и эксплуатации систем автоматического управления.
В соответствии с классическим методом решение дифференциального уравнения для системы ищется в виде:
y(t) = у св (t) + у вын (t). (4.1.1)
Здесь у св (t) – свободная составляющая, общее решение однородного дифференциального уравнения с нулевой правой частью:
a 0 y (n) + a 1 y (n-1) + ... + a n-1 y’ + a n y = 0,
т.е. когда все внешние воздействия сняты, и состояние системы определяются лишь собственной структурой.
Функция у вын (t) представляет собой частное решение неоднородного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. Физически это означает, что к системе приложено внешнее воздействие u(t). Поэтому вторая составляющая общего решения называется вынужденной. Она определяет вынужденный установившийся режим работы системы при наличии на входе определенного воздействия u(t) или f(t) после окончания переходного процесса.
Можно провести аналогию между САУ и пружиной, колебания которой описываются аналогичным дифференциальным уравнением (рис. 4.1.2). Оттянем пружину, а затем отпустим, предоставив ее самой себе. Пружина будет колебаться в соответствии со свободной составляющей решения уравнения, характер колебаний будет определяться только структурой самой пружины. Если подвесить к пружине груз, то на свободные колебания наложится внешняя сила Р. После затухания колебаний, описываемых только свободной составляющей общего решения, система перейдет в новый установившийся режим, характеризуемый вынужденной составляющей у вын = y(t®∞). Если внешнее воздействие само будет изменяться по синусоидальному закону P = P o sin(wt+j), то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть у вын = y max sin(wt+j).
Только устойчивая система является работоспособной. Основы строгой теории устойчивости динамических систем были разработаны акад. А. М. Ляпуновым в работе «Общая задача об устойчивости движения» (1892 г.). Понятия об устойчивости, вытекающие из этой работы, заключаются в следующем.
Если система описывается линейным дифференциальным уравнением, то ее устойчивость не зависит от величины возмущения. Линейная система, устойчивая при малых возмущениях, будет устойчива и при больших. Нелинейные системы могут быть устойчивы при малых возмущениях и неустойчивы при больших.
Наглядное представление о системах, устойчивых при малых и неустойчивых при больших возмущениях, дает поведение шара во впадине на рисунке слева. При малых воздействиях на шар и его малых отклонениях не выше края впадины шар возвращается в исходное положение и система шар - поверхность устойчива. При больших воздействиях с отклонением за край впадины шар не возвращается в исходное положение - система неустойчива. Поэтому устойчивость систем исследуется отдельно для случая малых и больших возмущений.Проблема устойчивости обычно возникает в замкнутых системах из-за влияния обратной связи. Поэтому в дальнейшем устойчивость исследуется на примерах замкнутых систем, хотя методы исследования устойчивости универсальны.
Условие устойчивости САУ. Применительно к сигналам в САУ частное решение для вынужденной составляющей обычно имеет простой вид, не влияющий на устойчивость. Вопрос устойчивости сводится к выяснению устойчивости свободного движения системы и требует анализа характера решения уравнения свободного движения, составленного относительно отклонения выходной величины y(t) от установившегося состояния.
Как известно, передаточная функция любой линейной динамической системы может быть приведена к виду:
W(p) = K(p)/H(p) =
= / , (4.1.2)
где a и b - постоянные коэффициенты, которые представляют собой вещественные числа и выражаются через конкретные физические параметры элементов системы. Полином К(р) может не содержать членов с оператором р и представлять собой произведение коэффициентов передачи звеньев, образующих систему.
Важнейшим свойством выражения (4.1.2) является условие n≥m, т. е. порядок полинома Н(р) знаменателя передаточной функции не ниже порядка полинома К(р) ее числителя. Это условие вытекает из физических свойств звеньев реальных динамических систем.
PAGE \* MERGEFORMAT 14
Лекция №4
Устойчивость САУ
Свойство системы приходить в исходное состояние после снятия возмущения называется устойчивостью.
Определение.
Кривые 1 и 2 характеризуют устойчивую систему, кривые 3 и 4 характеризуют системы неустойчивые.ε
Системы 5 и 6 на границе устойчивости 5 - нейтральная система, 6 - колебательная граница устойчивости.
Пусть дифференциальное уравнение САУ в операторной форме имеет вид
Тогда решение дифференциального уравнения (движение системы) состоит из двух частей Вынужденное движение того же вида что и входное воздействие.
При отсутствии кратных корней где С i -постоянные интегрирования, определяемые из начальных условий,
1 , 2 …, n корни характеристического уравнения
Расположение корней характеристического
уравнения системы на комплексной плоскости
Корни характеристического уравнения не зависят ни от вида возмущения, ни от
начальных условий, а определяются только коэффициентами а 0 , а 1 , а 2 ,…,а n , то есть параметрами и структурой системы.
1-корень действительный, больше нуля;
2-корень действительный, меньше нуля;
3-корень равен нулю;
4-два нулевых корня;
5-два комплексных сопряженных корня, действительная часть которых
Положительна;
6-два комплексных сопряженных корня, действительная часть которых отрицательная;
7-два мнимых сопряженных корня.
Методы анализа устойчивости :
- Прямые (основаны на решении дифференциальных уравнений);
- Косвенные (критерии устойчивости).
Теоремы А.М. Ляпунова.
Теорема 1.
Теорема 2.
Примечания:
- Если среди корней характеристического уравнения имеется два и более нулевых корня, то система неустойчива.
- Если один корень нулевой, а все остальные находятся в левой полуплоскости, то система нейтральна.
- Если 2 корня мнимые сопряженные, а все остальные в левой полуплоскости, то система на колебательной границе устойчивости.
Критерии устойчивости САУ.
Критерий устойчивости - это правило, позволяющее выяснить устойчивость системы без вычисления корней характеристического уравнения.
В 1877г. Раус установил:
1. Критерий устойчивости Гурвица
Критерий разработан в 1895г.
Пусть определено характеристическое уравнение замкнутой системы: уравнение приводим к виду, чтобы a 0 >0.
Составим главный определитель Гурвица по следующему правилу:
по главной диагонали записываются коэффициенты уравнения, начиная со второго по последний, столбцы вверх от диагонали заполняются коэффициентами с возрастающими индексами, а столбцы вниз от диагонали - коэффициентами с убывающими индексами. В случае отсутствия в уравнении какого-либо коэффициента и вместо коэффициентов с индексами меньше 0 и больше n пишут нуль.
Выделим диагональные миноры или простейшие определители в главном определителе Гурвица:
Формулировка критерия.
Для систем выше второго порядка кроме положительности всех коэффициентов характеристического уравнения необходимо выполнение следующих неравенств:
- Для систем третьего порядка:
- Для систем четвертого порядка:
- Для систем пятого порядка:
- Для систем шестого порядка:
Пример. Дано характеристическое уравнение исследовать устойчивость системы по Гурвицу.
Для устойчивых систем необходимо и
2. Критерий Рауса
Критерий Рауса используется при исследовании устойчивости систем высокого порядка.
Формулировка критерия:
Таблица Рауса.
Алгоритм заполнения таблицы: в первой и второй строках записываются коэффициенты уравнения с четными и нечетными индексами; элементы остальных строк вычисляются по следующему правилу:
Достоинство критерия: можно исследовать устойчивость систем любого порядка.
2. Критерий устойчивости Найквиста
Принцип аргумента
В основе частотных методов лежит принцип аргумента.
Проведем анализ свойств многочлена вида:
Где i - корни уравнения
На комплексной плоскости каждому корню соответствует вполне определенная точка. Геометрически каждый корень i можно изобразить в виде вектора, проведенного из начала координат в точку i : | i | - длина вектора, arg i - угол между вектором и положительным направлением оси абсцисс. Отобразим D(p) в пространство Фурье, тогда где j - i - элементарный вектор.
Концы элементарных векторов находятся на мнимой оси.
Модуль вектора, а аргумент (фаза)
Направление вращения вектора против часовой стрелки принимают за ПОЛОЖИТЕЛЬНОЕ. Тогда при изменении от до каждый элементарный вектор ( j - i ) повернется на угол + , если i лежит в левой полуплоскости.
Пусть D ( )=0 имеет m корней в правой полуплоскости и n - m корней в левой, тогда при возрастании от до изменение аргумента вектора D(j ) (угол поворота D(j ), равный сумме изменений аргументов элементарных векторов) будет
Принцип аргумента:
Критерий Найквиста базируется на частотных характеристиках разомкнутой цепи САУ, так как по виду частотных характеристик разомкнутой цепи можно судить об устойчивости замкнутой системы.
Критерий Найквиста нашел широкое применение в инженерной практике по следующим причинам:
- Устойчивость системы в замкнутом состоянии исследуют по частотной передаточной функции ее разомкнутой цепи, а эта функция, чаще всего состоит из простых сомножителей. Коэффициентами являются реальные параметры системы, что позволяет выбирать их из условий устойчивости.
- Для исследования устойчивости можно использовать экспериментально полученные частотные характеристики наиболее сложных элементов системы (объект регулирования, исполнительный орган), что повышает точность полученных результатов.
- Исследовать устойчивость можно по ЛЧХ, построение которых несложно.
- Удобно определять запасы устойчивости.
1. Система, устойчивая в разомкнутом состоянии
Пусть введем вспомогательную функцию заменим p j , тогда
Согласно принципа аргумента изменение аргумента D(j ) и D з (j ) при 0< < равно Тогда то есть годограф W 1 (j ) не должен охватывать начало координат.
Для упрощения анализа и расчетов сместим начало радиуса-вектора из начала координат в точку (-1, j 0), а вместо вспомогательной функции W 1 (j ) используем АФХ разомкнутой системы W (j ).
Формулировка критерия №1
Примеры.
Отметим, что разность числа положительных и отрицательных переходов АФХ левее точки (-1, j 0) равна нулю.
2. Система, имеющая полюсы на мнимой оси в разомкнутом состоянии
Для анализа устойчивости системы АФХ дополняют окружностью бесконечно большого радиуса при 0 против часовой стрелки до положительной вещественной полуоси при нулевых полюсах, а в случае чисто мнимых корней - полуокружностью по часовой стрелке в точке разрыва непрерывности АФХ.
Формулировка критерия №2
- Система с неустойчивой разомкнутой цепью
Более общий случай - знаменатель передаточной функции разомкнутой системы содержит корни, лежащие в правой полуплоскости. Появление неустойчивости разомкнутой системы вызывается двумя причинами:
- Следствием наличия неустойчивых звеньев;
- Следствием потери устойчивости звеньев, охваченных положительной или отрицательной обратными связями.
X отя теоретически вся система в замкнутом состоянии может быть устойчивой при наличии неустойчивости по цепи местной обратной связи, практически такой случай является нежелательным и его надо избегать, стремясь использовать только устойчивые местные обратные связи. Это объясняется наличием нежелательных свойств, в частности появлением условной устойчивости, которая при имеющихся обычно в системе нелинейностях может в некоторых режимах привести к потере устойчивости и появлению автоколебаний. Поэтому, как правило, при расчете системы выбирают такие местные обратные связи, которые были бы устойчивыми при разомкнутой главной обратной связи .
Пусть характеристический многочлен D (p ) разомкнутой системы имеет m корней с положительной вещественной частью.
Тогда
Вспомогательная функция при замене p j согласно принципа аргумента для устойчивых замкнутых систем должна иметь следующее изменение аргумента при
Формулировка критерия №3
Формулировка Я.З. Цыпкина
Критерий Найквиста для ЛЧХ
Примечание: фазовая характеристика ЛЧХ астатических систем дополняется монотонным участком + /2 при 0.
|
Пример 1. Здесь m =0 система устойчива, но при уменьшении k система может быть неустойчива, поэтому такие системы называются условно-устойчивыми. |
Пример 2. 20 lgk 1/ T 0 Здесь При любых k система неустойчива. Такие системы называются структурно-неустойчивыми. |
|
Пример 3. АФХ охватывает точку с координатами (-1, j 0) 1/2 раза, следовательно замкнутая система устойчива. |
Пример 4. при 0 АФХ имеет разрыв, и поэтому ее нужно дополнить дугой бесконечно большого радиуса от отрицательной вещественной полуоси. На участке от -1 до - имеется один положительный переход и полтора отрицательных. Разность между положительными и отрицательными переходами равна -1/2, а для устойчивости замкнутой системы требуется +1/2, так как характеристический полином разомкнутой системы имеет один положительный корень - система неустойчива. |
Абсолютно-устойчивой называют систему, которая сохраняет устойчивость при любом уменьшении коэффициента усиления разомкнутой цепи, иначе система условно- устойчивая.
Системы, которые можно сделать устойчивыми путём изменения их параметров, называются структурно-устойчивыми , иначе структурно-неустойчивыми.
Запасы устойчивости
Для нормального функционирования всякая САР должна быть удалена от границы устойчивости и иметь достаточный запас устойчивости. Необходимость этого обусловлена следующими причинами:
- Уравнения элементов САР, как правило, идеализированы, при их составлении не учитывают второстепенные факторы;
- При линеаризации уравнений погрешности приближения дополнительно увеличиваются;
- Параметры элементов определяют с некоторой погрешностью;
- Параметры однотипных элементов имеют технологический разброс;
- При эксплуатации параметры элементов изменяются вследствие старения.
В практике инженерных расчетов наиболее широко используют определение запаса устойчивости на основе критерия НАЙКВИСТА, по удалению АФХ разомкнутой системы от критической точки с координатами (-1, j 0), что оценивают двумя показателями: запасом устойчивости по фазе и запасом устойчивости по модулю (по амплитуде) H .
Для того чтобы САР имела запасы устойчивости не менее и H , АФХ ее разомкнутой цепи при удовлетворении критерия устойчивости не должна заходить в часть кольца, заштрихованного на рис. 1, где H определяется соотношением
Если устойчивость определяется по ЛЧХ условно-устойчивых систем, то для обеспечения запасов устойчивости не менее и h необходимо, чтобы:
а) при h L - h фазо-частотная характеристика удовлетворяла неравенствам θ > -180 + или θ < -180 - , т.е. не заходила в заштрихованную область 1 на рис. 2;
б) при -180 + θ -180 - амплитудно-частотная характеристика удовлетворяла неравенствам L < - h или L > h , т.е. не заходила в заштрихованные области 2" и 2"" на рис. 2.
Для абсолютно устойчивой системы запасы устойчивости и h определяют так, как показано на рис. 3:
1. Запас по фазе
- Запас по модулю h =- L (ω -π ), где ω -π частота, при которой θ=-180 ˚ .
Необходимые значения запасов устойчивости зависит от класса САР и требований к качеству регулирования. Ориентировочно должно быть =30 60 и h =6 20дБ.
Минимально допустимые запасы устойчивости по амплитуде должны быть не менее 6дБ (то есть передаточный коэффициент разомкнутой системы в два раза меньше критического), а по фазе не менее 25 30 .
Устойчивость системы со звеном чистого запаздывания
Если АФХ разомкнутой системы проходит через точку (-1, j 0), то система на грани устойчивости.
Систему с чистым запаздыванием можно сделать устойчивой, если в схему включить безынерционное звено с передаточным коэффициентом, меньшим 1. Возможны и другие виды корректирующих устройств.
Структурно-устойчивые и структурно-неустойчивые системы
Один из способов изменения качества системы (в смысле устойчивости) это изменить передаточный коэффициент разомкнутой системы.
При изменении k L ( ) поднимется либо опускается. Если k увеличивать, L ( ) поднимается и ср будет возрастать, а система останется неустойчивой. Если k уменьшать, то систему можно сделать устойчивой. Это один из способов коррекции системы.
Системы, которые можно сделать устойчивыми путем изменения параметров системы, называются СТРУКТУРНО-УСТОЙЧИВЫМИ.
Для этих систем есть критический передаточный коэффициент разомкнутой системы. K крит. это такой передаточный коэффициент, когда система на грани устойчивости.
Существуют системы СТРУКТУРНО-НЕУСТОЙЧИВЫЕ это такие системы, которые невозможно сделать устойчивыми изменением параметров системы, а требуется для устойчивости изменять структуру системы.
Пример.
Рассмотрим три случая:
- Пусть
Тогда
Проверим работу системы на устойчивость.
Δ = а 3 Δ 2 >0.
Для определения k рс.кр. приравняем нулю 2 .
Тогда
При при
Рассматриваемая система СТРУКТУРНО-УСТОЙЧИВАЯ, так как ее можно стабилизировать путем изменения параметров звеньев.
- Пусть и те же, что в первом случае.
Теперь Статической ошибки по каналу управления нет.
Условия устойчивости по Гурвицу:
Пусть 2 =0, тогда если то система неустойчивая.
Данная система с астатизмом 1-го порядка СТРУКТУРНО-УСТОЙЧИВАЯ.
- Пусть
Всегда система неустойчива. Эта система СТРУКТУРНО-НЕУСТОЙЧИВАЯ.
Система автоматического управления имеет инерционности различной физической природы, которые замедляют процессы. Единичный скачок, который обычно рассматривается в качестве тестового сигнала САУ (рисунок 1), может быть разложен в ряд:

Рисунок 1. Типовая структура САУ
Наличие инерционностей
обуславливает сдвиг по фазе сигнала
обратной связи
 относительно входного
относительно входного ,
причем фазовый сдвиг зависит как от
номера гармоники, так и от постоянных
времени. Так для апериодического звена
1-го порядка фазовый сдвиг определяется:
,
причем фазовый сдвиг зависит как от
номера гармоники, так и от постоянных
времени. Так для апериодического звена
1-го порядка фазовый сдвиг определяется:
 .
(2)
.
(2)

Рисунок 2. Фазовый сдвиг на выходе САУ
Поскольку на входе
САУ действует бесконечный спектр
гармонических составляющих, то среди
них найдется такая гармоника, фазовый
сдвиг которой равен
 (рисунок
2), т.е. выходной сигнал будет в противофазе
с входным.
(рисунок
2), т.е. выходной сигнал будет в противофазе
с входным.
Так как обратная
связь отрицательная, то на входе системы
он действует в фазе с входным (пунктир
на рисунке 2), причем сигнал обратной
связи действует в тот момент, когда
 .
.
Пусть амплитуда
гармонической составляющей, фазовый
сдвиг которой
 ,
равна 0.5, а коэффициент передачи системы
по этой гармонике больше единице,
например равен 2. Тогда на выходе сигнал
после первого периода
,
равна 0.5, а коэффициент передачи системы
по этой гармонике больше единице,
например равен 2. Тогда на выходе сигнал
после первого периода ,
после второго периода
,
после второго периода ,
после третьего
,
после третьего и т.д., т.е. процесс расходящийся
(неустойчив) (рисунок 3).
и т.д., т.е. процесс расходящийся
(неустойчив) (рисунок 3).
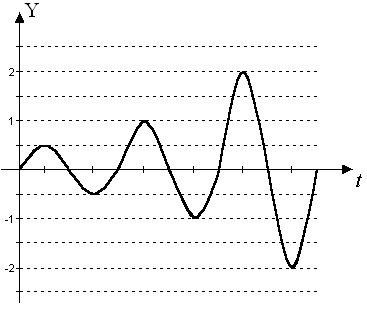
Рисунок 3.
Переходный процесс для гармоники
 при
k
>1.
при
k
>1.
Если коэффициент
передачи системы для гармоники, фазовый
сдвиг которой
 ,
меньше единицы, то процесс будет затухать
(система устойчива).
,
меньше единицы, то процесс будет затухать
(система устойчива).
Таким образом,
замкнутая система будет устойчивой,
если коэффициент передачи её для
гармонической составляющей, фазовый
сдвиг, которой равен
 ,
меньше единицы.
,
меньше единицы.
Если коэффициент передачи для указанной гармоники равен единице, то система находится на границе устойчивости и выходная координата изменяется по гармоническому закону с постоянной амплитудой.
Для системы (рисунок 1) выходная координата определяется:
Причинами отклонения
САУ от положения равновесия являются
изменение входной величины
 и возмущающих воздействий
и возмущающих воздействий .
.
Если и
и т.е. причины отклонения системы от
положения равновесия отсутствуют, то
т.е. причины отклонения системы от
положения равновесия отсутствуют, то .
.
Если при отсутствии
причин отклонения
 ,
, знаменатель
знаменатель ,
то это означает, что выходная координата
,
то это означает, что выходная координата может принимать любые отличные от нуля
значения, поскольку в этом случае имеем:
может принимать любые отличные от нуля
значения, поскольку в этом случае имеем:
 .
(4)
.
(4)
Следовательно, в системе возникает незатухающие колебания при условии:
 .
(5)
.
(5)
Заметим, что это условие похоже на условие самовозбуждения усилителя с ООС Баркгаузена: самовозбуждение системы имеет место, когда усиливается столько напряжения или другой величины, сколько его (её) отводится по каналу обратной связи:
 .
(6)
.
(6)
1.2 Определение устойчивости систем автоматического управления
Любая система автоматического управления (САУ) должна быть работоспособной, т.е. нормально функционировать при воздействий возмущений различного рода. Работоспособность САУ определяется ее устойчивостью, которая является одной из основных динамических характеристик системы.
Устойчивость - свойство системы возвращаться в исходное положение равновесия или близкий к нему режим после окончания действия возмущения, вызвавшего отклонение системы от положения равновесия. Неустойчивая работа может возникнуть в любой САУ с обратной связью, при этом, система удаляется от положения равновесия.
Если известна функция веса системы ω(t ) , то линейная система устойчива, если ω(t ) остается ограниченной при любых ограниченных по величине входных возмущениях:
 ,
(7)
,
(7)
где с - const .
Следовательно, об устойчивости системы можно судить по общему решению линеаризованного однородного дифференциального уравнения замкнутой САУ, поскольку устойчивость не зависит от вида описываемого возмущения. Система устойчива, если переходная составляющая затухает во времени:
 .
(8)
.
(8)
Если
 ,
то САУ
неустойчива.
,
то САУ
неустойчива.
Если
 не стремится ни к нулю, ни к бесконечности
то система находится на границе
устойчивости.
не стремится ни к нулю, ни к бесконечности
то система находится на границе
устойчивости.
Поскольку общее решение дифференциального уравнения зависит от вида корней характеристического уравнения САУ, то определение устойчивости можно производить без непосредственного решения однородного дифференциального уравнения.
Если характеристическое уравнение линейного дифференциального уравнения с постоянными коэффициентами САУ имеет вид
то его решение, следующее:
 ,
(10)
,
(10)
где c - постоянные интегрирования;
p t - корни характеристического уравнения.
Следовательно, САУ устойчива, если
 (11)
(11)
Таким образом, для того, чтобы линейная САУ была устойчивая, необходимо и достаточно, чтобы вещественные части всех корней характеристического уравнения системы были отрицательны
R e p i < 0, (12)
а) для вещественных корней p i < 0,
 ,
(12.а)
,
(12.а)
для вещественных корней p i > 0;
 ;
(12.б)
;
(12.б)
б) для комплексных корней типа p i =α± jβ при α< 0
, (12.в)
для комплексных корней p i =α± jβ при α> 0
 ,
(12.г)
,
(12.г)
Следовательно, САУ устойчива, если все корни характеристического уравнения (9) располагаются в левой полуплоскости комплексной плоскости корней. Система находится на границе устойчивости, если хотя бы один вещественный корень или пара комплексных корней находятся на мнимой оси. Различают апериодическую и колебательную границы устойчивости.
Если хотя бы один корень характеристического уравнения САУ равен нулю, то система находится на апериодической границе устойчивости. Характеристическое уравнение в этом случае (a n = 0) имеет следующий вид:
Система в том случае устойчива по отношению к скорости изменения регулируемой величины, по отношению же к реализуемой величине система нейтральна (нейтрально устойчивая система).
Если в характеристическом уравнении САУ имеется хотя бы пара чисто мнимых корней, то система находится на границе колебательной устойчивости. В этом случае в системе имеют место незатухающие гармонические колебания.
Таким образом, для выяснения устойчивости САУ следует решить характеристическое уравнение, т.е. найти его корни. Отыскание корней характеристического уравнения возможно, поскольку W 3 (p ) обычно представляет собой отношение двух алгебраических полиномов. Однако такой прямой метод для определения устойчивости оказывается весьма трудоемким, особенно при n > 3. Кроме того, для определения устойчивости необходимо знать только знаки корней и необязательно знать их значение, т.е. непосредственное решение характеристического уравнения дает “лишнюю информацию”. Поэтому для определения устойчивости целесообразно иметь косвенные методы определения знаков корней характеристического уравнения, не решая его. Эти косвенные методы определения знаков корней характеристического уравнения без непосредственного его решения - критерии устойчивости.
Необходимым условием работоспособности системы автоматического управления (САУ), является её устойчивость. Под устойчивостью принято понимать свойство системы восстанавливать состояние равновесия, из которого она была выведена под влиянием возмущающих факторов после прекращения их воздействия .Постановка задачи
Получение простого, наглядного и общедоступного инструмента для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.Теория просто и кратко
Анализ устойчивости системы по методу Михайлова сводится к построению характеристического многочлена замкнутой системы (знаменатель передаточной функции), комплексной частотной функции (характеристического вектора):Где и – соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
Замкнутая САУ устойчива, если комплексная частотная функция , начинаясь на
стрелки начало координат, проходя последовательно n квадрантов, где n – порядок характеристического уравнения системы, т. е.
 (2)
(2)

Рисунок 1. Амплитудно-фазовые характеристики (годографы) критерия Михайлова: а) – устойчивой системы; б) – неустойчивой системы (1, 2) и системы на границе устойчивости (3)
САУ электроприводом манипулятора промышленного робота (МПР)

Рисунок 2 – Структурная схема САУ электроприводом МПР
Передаточная функция данной САУ имеет следующее выражение :

(3)
где kу – коэффициент усиления усилителя, kм – коэффициент пропорциональности частоты вращения двигателя величине напряжения на якоре, Tу – электромагнитная постоянная времени усилителя, Tм – электромеханическая постоянная времени двигателя с учётом инерции нагрузки (по своим динамическим характеристикам двигатель представляет собой передаточную функцию последовательно соединённых инерционного и интегрирующего звеньев), kдс – коэффициент пропорциональности между входной и выходной величинами датчика скорости, K – коэффициент усиления главной цепи: .
Численные значения в выражение передаточной функции следующие:
K = 100 град / (В∙с); kдс = 0,01 В / (град∙с); Tу = 0,01 с; Tм = 0,1с.
Заменив s на :
(4)
Решение на Python
Здесь следует отметить, что подобные задачи на Python ещё никто не решал, во всяком случае я не нашёл. Это было связано с ограниченными возможностями работы с комплексными числами. С появлением SymPy можно сделать следующее:From sympy import *
T1,T2,w =symbols("T1 T2 w",real=True)
z=factor ((T1*w*I+1)*(T2*w*I+1)*w*I+1)
print ("Характеристический многочлен замкнутой системы -\n%s"%z)
Где I мнимая единица, w- круговая частота, T1= Tу = 0.01 ,T2= Tм = 0.1
Получим развёрнутое выражение для многочлена:
Характеристический многочлен замкнутой системы –
Сразу видим, что многочлен третьей степени. Теперь получим мнимую и действительную части в символьном отображении:
Zr=re(z)
zm=im(z)
print("Действительная часть Re= %s"%zr)
print("Мнимая часть Im= %s"%zm)
Получим:
Действительная часть Re= -T1*w**2 - T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Сразу видим вторую степень действительной части и третью мнимой. Подготовим данные для построения годографа Михайлова. Введём численные значения для T1 и T2, и будем менять частоту от 0 до 100 с шагом 0.1 и построим график:
From numpy import arange
import matplotlib.pyplot as plt
x=
y=
plt.plot(x, y)
plt.grid(True)
plt.show()

Из графика не видно, то годограф начинается на действительной положительной оси. Нужно изменить масштабы осей. Приведу полный листинг программы:
From sympy import *
from numpy import arange
import matplotlib.pyplot as plt
T1,T2,w =symbols("T1 T2 w",real=True)
z=factor((T1*w*I+1)*(T2*w*I+1)*w*I+1)
print("Характеристический многочлен замкнутой системы -\n%s"%z)
zr=re(z)
zm=im(z)
print("Действительная часть Re= %s"%zr)
print("Мнимая часть Im= %s"%zm)
x=
y=
plt.axis([-150.0, 10.0, -15.0, 15.0])
plt.plot(x, y)
plt.grid(True)
plt.show()
Получим:
-I*T1*T2*w**3 - T1*w**2 - T2*w**2 + I*w + 1
Действительная часть Re= -T1*w**2 - T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w

Теперь уже видно, что годограф начинается на действительной положительной оси. САУ устойчива, n=3, годограф совпадает с приведённым на первом рисунке.
Дополнительно убедится в том, что годограф начинается на действительной оси можно дополнив программу следующим кодом для w=0:
Print("Начальная точка М(%s,%s)"%(zr.subs({T1:0.01,T2:0.1,w:0}),zm.subs({T1:0.01,T2:0.1,w:0})))
Получим:
Начальная точка М(1,0)
САУ сварочного робота
Наконечник сварочного узла (НСУ) подводится к различным местам кузова автомобиля, быстро и точно совершает необходимые действия. Требуется определить устойчивость по критерию Михайлова САУ позиционированием НСУ.
Рисунок 3. Структурная схема САУ позиционированием НСУ
Характеристическое уравнение данной САУ будет иметь вид :
Где K – варьируемый коэффициент усиления системы, a – определённая положительная константа. Численные значения: K = 40; a = 0,525.
Решение на Python
rom sympy import * from numpy import arange import matplotlib.pyplot as plt w =symbols(" w",real=True) z=w**4-I*6*w**3-11*w**2+I*46*w+21 print("Характеристический многочлен замкнутой системы -\n%s"%z) zr=re(z) zm=im(z) print("Начальная точка М(%s,%s)"%(zr.subs({w:0}),zm.subs({w:0}))) print("Действительная часть Re= %s"%zr) print("Мнимая часть Im= %s"%zm) x= y= plt.axis([-10.0, 10.0, -50.0, 50.0]) plt.plot(x, y) plt.grid(True) plt.show()Получим:
Характеристический многочлен замкнутой системы - w**4 - 6*I*w**3 - 11*w**2 + 46*I*w + 21
Начальная точка М(21,0)
Действительная часть Re= w**4 - 11*w**2 + 21
Мнимая часть Im= -6*w**3 + 46*w

Построенный годограф Михайлова, начинаясь на вещественной положительной оси (М (21,0)), огибает в положительном направлении начало координат, проходя последовательно четыре квадранта, что соответствует порядку характеристического уравнения. Значит, данная САУ позиционированием НСУ – устойчива.
Выводы
При помощи модуля SymPy Python получен простой и наглядный инструмент для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.Ссылки
- Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. – М.: Лаборатория Базовых Знаний, 2002. – 832 с.
- Юревич Е.И. Основы робототехники 2-е издание / Е.И. Юревич. – С-Пб.: БХВ-Петербург, 2005. – 416 с.